ロボットカーの作り方
自分だけのロボットカーがうろうろしているのを見たいと思ったことはありませんか?電子部品とArduinoマイコン、そしてコピー&ペーストでプログラミングを行い、1つの作品を作り上げましょう。このようなプロジェクトに挑戦したことがなくても、この機会にハンダ付けの練習をしたり、基本的なコードに慣れたりすることができます...
第1部/第4部:シャーシの製作
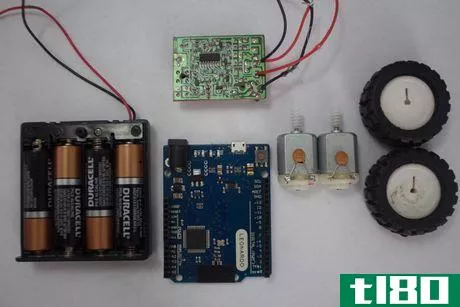
- 1 材料を集める。ロボットカーを作るには、以下の材料が必要です。各パーツのサイズがわからない場合は、この説明書を読んで、どのように組み合わせるかを確認してください。モーター2個 車輪2個 Arduinoマイコンボード(Arduino Unoは初心者におすすめ) モーター駆動シールドまたはモーター駆動回路(RCトイカーに搭載) 電池ホルダーと6V電池(例:単3電池4本) シャーシ:アクリル板またはプレキシガラス、約 6.5 x 4.5 インチ (16.5 x 11.5 cm).
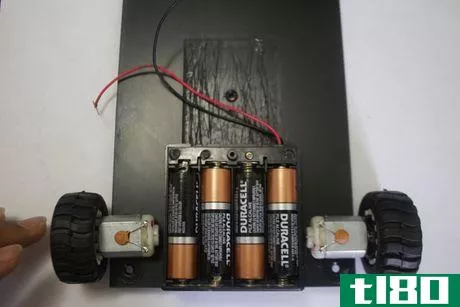
- 2.シャーシに車輪とモーターを取り付ける。各ホイールをモーターの1つにねじ込みます。シャーシの片方の端に近い、互いに反対側の2つの位置に印をつけ、以下のようにモーターをシャーシにホットボンドで接着します。シャーシの上面、各位置にモーターを接着します。車輪が端にかかるようにし、地面に沿って転がるようにする。
- 3. 電池ホルダーに接着剤を塗る。シャーシの上側で、車輪の間にスプーン1杯のホットグルーをつける。電池ホルダーを押して固定させる。
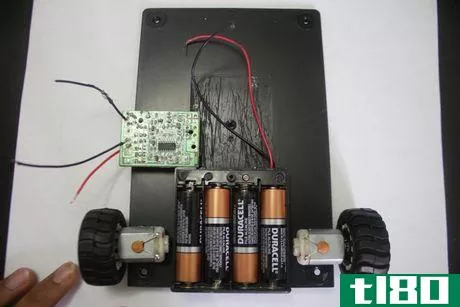
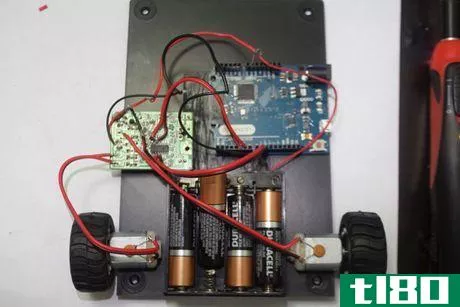
- 4 モーター駆動回路を取り付ける。モーター駆動回路は、筐体に近い側の端に配線がはみ出るように置きます。
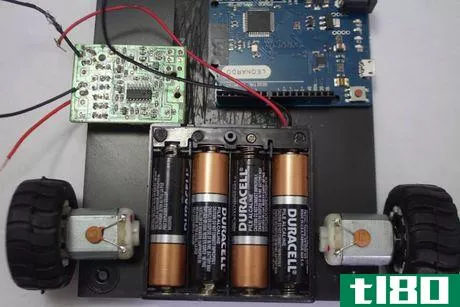
- 5 Arduinoを配置します。Arduinoを駆動回路と反対側に倒して、シャーシに接着します。位置決めの際には、Arduinoをコンピュータに接続するためのソケットにアクセスできることを確認してください。



第2回/全4回:クルマに配線を施す
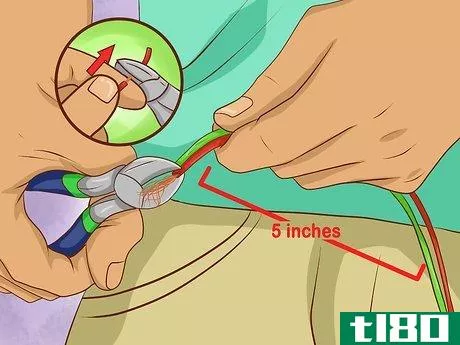
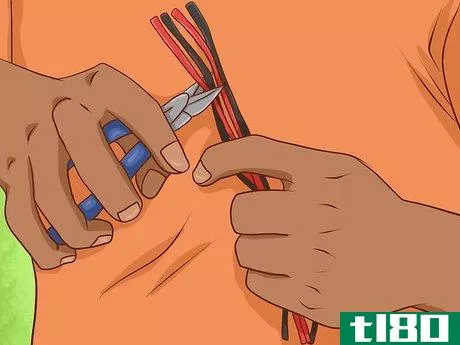
- 1 ワイヤーを4分割してカットします。両端を切り落とした絶縁電線が4本必要です。まずこの章を読んで、各ワイヤーの接続方法を確認し、各ワイヤーを適切な長さに切断してください。通常、1本のワイヤーの長さは5インチ(13cm)程度が望ましい。
- 2 2本のワイヤーを1つのモーターにハンダ付けします。ハンダ付けの経験があまりない方は、まず電子機器のハンダ付けのガイドをお読みください。
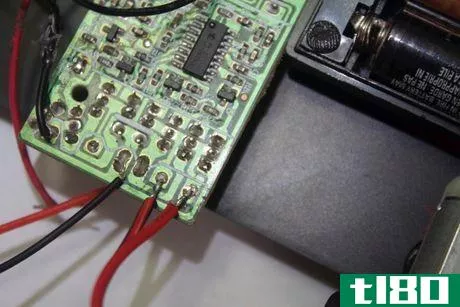
- 3 モータードライバにもう一方の端をはんだ付けします。モータドライバ回路のm1,m2というモータピンの位置を確認します。ドライブにこれらのラベルがない場合は、モータドライバの図をオンラインで検索してください。
- 4 もう一方のモーターについても、上記の手順を繰り返します。残りの2本のワイヤーを2番目のモーターの2つのピンにはんだ付けします。これらの配線のもう一方は,m3,m4と書かれたドライバピンにはんだ付けしてください。
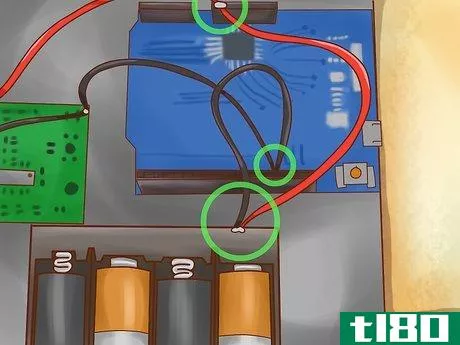
- 5 バッテリーホルダーを接続します。バッテリーホルダーには、プラス(赤)とマイナス(黒)の2本の接続線があるはずです。プラス線をArduinoのVin端子に、マイナス線をArduinoのGnd(グランド)端子に接続してください。
- 6 モータードライバ回路を接続します。モータードライバも2本の配線があります。モータードライバ回路のプラス端子とArduinoのVin端子を接触させます。モーター駆動回路のGnd端子とArduinoのGnd端子を接続します。Arduinoのピンの識別が難しい場合は、お使いの機種に特化したオンラインガイドをご覧ください。



第3回/第4回:Rx回路制御のセットアップ
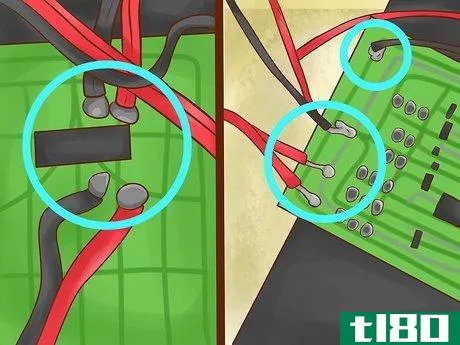
- 1 プロセスを理解する。このセクションのハックは、外部のモータードライバを必要とせず、Arduinoが直接モーターを駆動することを可能にします。この図は、モータードライバ回路に搭載されているIC(集積回路)を表しています。この部分は慎重にハンダ付けする必要があります。ゆっくり、計画的に仕事をする。
- 2 同じ長さの線を4本切ってください。これらは、Arduinoとモータードライバ回路を接続します。
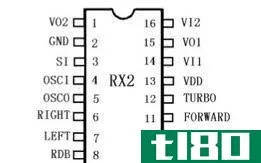
- 3 配線をはんだ付けする。各ワイヤーをICのピンの1つにハンダ付けします。2番目のピンと接触しないように注意してください。以下のように、ICのピン配置図に示された左側のピンに1本ずつはんだ付けします。左のピンは上から7番目です。ICのピン配置図に示された右側のピンにワイヤーをはんだ付けする。右のピンは上から6番目、「左」のすぐ上にあります。ICのピン配置図のBACKWARDピンにワイヤーをはんだ付けしてください。BACKWARDピンは上から10番目のピンで、ちょうど「左」の反対側にあります。FORWARDピンは「後」のすぐ上にあり、ちょうど「右」の反対側にあります。
- 4 Arduinoに配線を接続します。配線が混ざらないように注意し、以下のように各配線をArduinoに接続します。左の配線はArduinoの5番ピンに接続します。右側のワイヤーを6番ピンに接続します。バックワイヤーを9番ピンに接続します。
- 5 配線を確認する すべての配線を再確認し、短絡の原因となる不用意な接続がないことを確認する。

第4回 ロボットカーのプログラミング
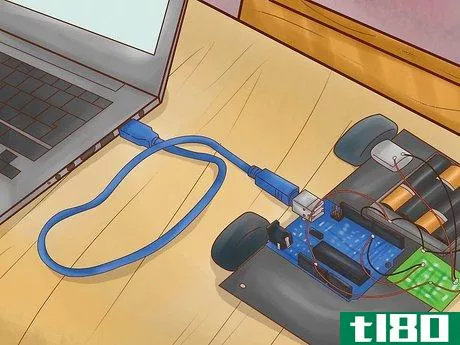
- 1 Arduinoをパソコンに接続します。Arduinoの回路をコンピュータに接続します。Arduinoのソフトを起動します。これによって、車の動きをプログラムすることができます。Arduinoのソフトウェアは、オンラインで無料で入手できます。
- 2 以下のコードをアップロードしてください。Arduinoに以下のプログラムを入力し、完了したら回路にアップロードしてください。int Fmotor=10;//initialize all motors int Bmotor=9;int Rmotor=6;int Lmotor=5;void setup() { //ここに設定コードを入れて一度実行してください pinMode( Fmotor,OUTPUT);// 出力に設定 pinMode( Bmotor,OUTPUT); pinMode( Lmotor,OUTPUT); pinMode( Rmotor,OUTPUT);}void loop() { //メインコードをここに入れて何度も走らせます。digitalWrite(Fmotor,HIGH);// 車を直進させるコード digitalWrite(Lmotor,HIGH); digitalWrite(Rmotor,LOW);// 両ピンをハイにしない digitalWrite(Bmotor,LOW); delay(5000); digitalWrite(Rmotor,HIGH); //右回転 digitalWrite(Lmotor,LOW); digitalWrite(Bmotor,LOW); digitalWrite(Fmotor,HIGH); delay(5000)。800); digitalWrite(Fmotor,HIGH);// 車を直進させるコード digitalWrite(Lmotor,HIGH); digitalWrite(Rmotor,LOW); digitalWrite(Bmotor,LOW); delay(5000);}.
- 3 車を発進させる。平らな場所に車を置く。電池を入れ、電源が入るのを見ましょうバッテリーホルダーにスイッチが付いている場合は、それを切り替えて車の電源を入れます。電池ホルダーからのプラス線をSPST(単極単投)スイッチの中心ピンに接続することで、独自のスイッチを追加することができます。スイッチのもう一方のピンをArduinoのVinピンに接続します。
- 4 コードを弄ってみる。コードの値を変更し、新しいプログラムをアップロードすると、車の挙動が変化します。delay」の後の数字を変えてみたり、レベルを低いところから高いところへ、またはその逆をしたときにどうなるかを確認してみてください。ただ、モータの両端子を同時にハイにしないように注意してください。

- コードの中で、//の記号に続くテキスト断片はコメントで、各コードが何をするのかを明確にするために使われる。
- もし、思ったような走りができない場合は、LmotorとRmotor、またはFmotorとBmotorの値を入れ替えてみてください。
- 2022-03-10 17:26 に公開
- 閲覧 ( 24 )
- 分類:IT