如何建立一个机器人汽车(build a robot car)
第一部分 4的第一部分:建造底盘
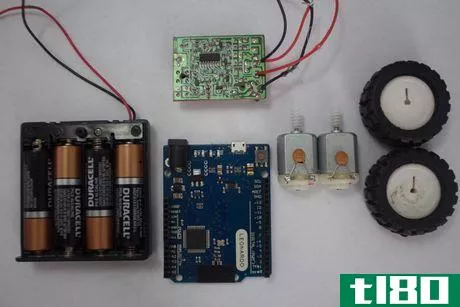
- 1收集材料。你将需要以下材料来建造你的机器人汽车。如果你不确定每个部件的尺寸,请阅读这些说明,了解它们是如何组合在一起的。两个马达两个轮子Arduino微控制器板(Arduino Uno是初学者的一个好选择)马达驱动盾牌或马达驱动电路(在遥控玩具车中发现)电池座和6伏的电池(例如四节AA电池)底盘:一张丙烯酸或有机玻璃,大约6.5 x 4.5英寸(16.5 x 11.5厘米)。
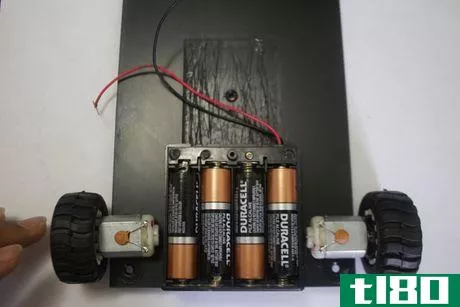
- 2.将车轮和马达安装到底盘上。将每个轮子穿到其中一个马达上。将马达热粘在底盘上,方法如下:在靠近底盘一端的两个位置上做标记,彼此相对。在每个位置上粘上一个马达,在底盘的上侧。确保轮子挂在边缘,以便它能沿着地面滚动。
- 3.在电池座上涂胶。在底盘的上侧,在车轮之间添加一勺热胶。将电池座压在这里,并让其固定。
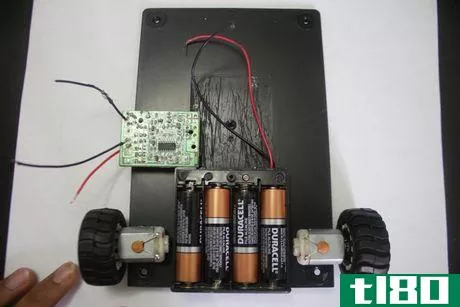
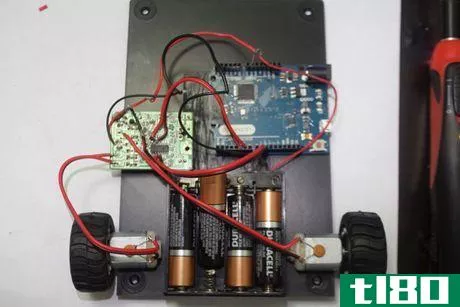
- 4安装电机驱动电路。将马达驱动电路放在靠近底盘的一侧,电线悬空在边缘上。
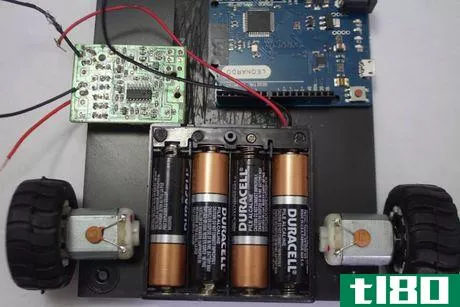
- 5放置Arduino。将Arduino粘在底盘上,塞在驱动电路的对面。当定位时,确保你能接触到用于将Arduino插入计算机的插座。



第2部分 4的第2部分:汽车的布线
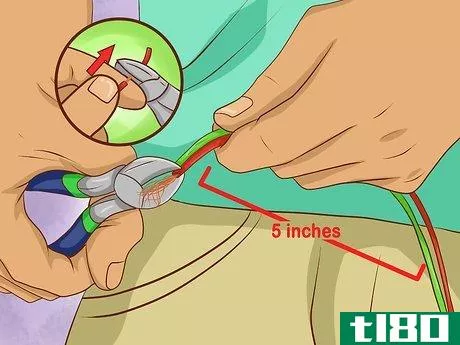
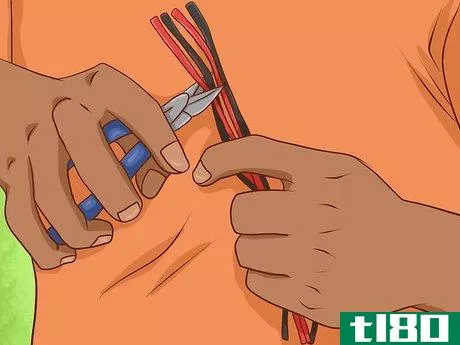
- 1切四段电线。你将需要四段绝缘线,每一端都被剥掉。先阅读本节,了解每条电线的连接方式,这样你就可以把每条电线剪成合适的长度。通常情况下,每根电线应该是大约5英寸(13厘米)长。
- 2将两根导线焊接在一个电机上。如果你没有太多的焊接经验,请先阅读我们的电子焊接指南。
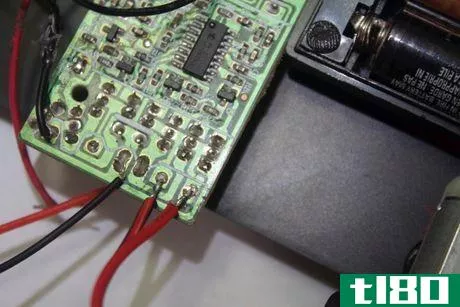
- 3将另一端焊接到电机驱动器上。找到电机驱动器电路上标有m1和m2的电机引脚。如果你的驱动器没有这些标签,请在网上查找你的电机驱动器的图。
- 4 对另一个电机重复上述步骤。将另外两根导线焊接到第二个电机的两个引脚上。将这些导线的另一端焊接到标有m3和m4的驱动器引脚上。
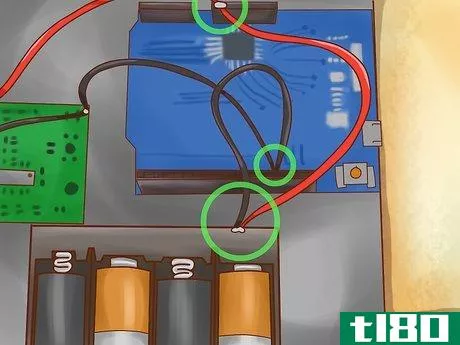
- 5连接电池座。电池座应该有两条连接线,一条正极(红色),一条负极(黑色)。连接方法如下:将正极线连接到Arduino的Vin针脚,将负极线连接到Arduino的Gnd(地)针脚。
- 6连接电机驱动电路。电机驱动器也有两条线。将这些线连接到Arduino上,与电池座上的线接触:将马达驱动电路上的正极引脚连接到Arduino上的Vin引脚。将马达驱动电路上的Gnd引脚连接到Arduino上的Gnd引脚。如果你在识别Arduino引脚方面有困难,可以找到针对你型号的在线指南。



第3部分 4的第3部分:设置Rx电路控制
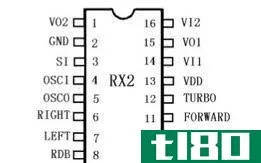
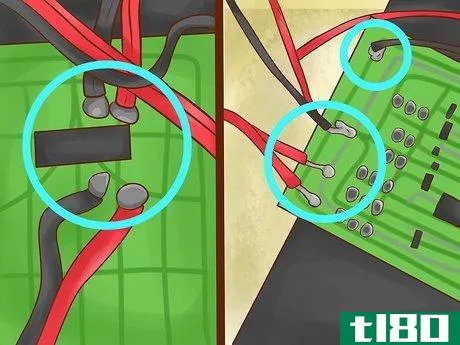
- 1了解这个过程。本节中的黑客允许Arduino直接驱动电机,而不需要外部电机驱动器。这里显示的图代表了电机驱动电路上的IC(集成电路)。这一部分需要仔细焊接。慢慢地、有条不紊地工作。
- 2剪下四根相同长度的电线。这些将连接Arduino和电机驱动电路。
- 3焊接导线。将每根导线焊接在集成电路的一个引脚上。注意不要与第二个引脚接触。焊接方法如下:将一根导线焊接到集成电路引脚图中所示的左侧引脚上。左边的引脚从顶部开始是第7个。将一根导线焊接到集成电路引脚图中的右边的引脚上。右边的引脚从上面开始是第6个,就在 "左 "的上面。将一根导线焊接到IC引脚图中的BACKWARD引脚上。BACKWARD针脚是第10个针脚,正好在 "左 "的对面。FORWARD针脚就在 "backward "的上方,正好与 "right "相对。
- 4将电线连接到Arduino上。注意不要混淆电线,按以下方式将每根电线连接到Arduino上:将左边的电线连接到Arduino的第5脚。将右边的电线连接到第6脚。将后退的电线连接到第9脚。
- 5检查你的布线。仔细检查你的所有接线。确保没有无意的连接造成短路。

第4部分 第4部分:机器人汽车编程
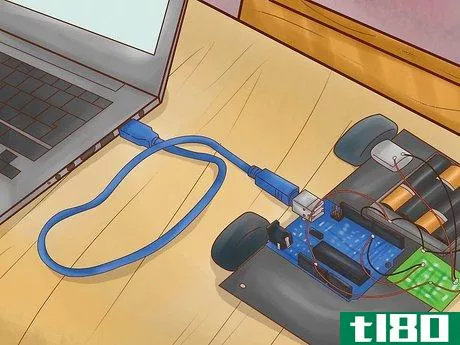
- 1将Arduino连接到计算机。将Arduino电路插入你的计算机。打开Arduino软件。这样你就可以对汽车的运动进行编程。Arduino软件可以在网上免费获得。
- 2上传以下代码。将以下程序输入Arduino。一旦完成,将其上传到你的电路中。这段代码将使你的车前进5秒,右转,再前进5秒:int Fmotor=10;//初始化所有电机int Bmotor=9;int Rmotor=6;int Lmotor=5;void setup() { //把你的设置代码放在这里,运行一次。pinMode( Fmotor,OUTPUT);//将它们设置为输出 pinMode( Bmotor,OUTPUT); pinMode( Lmotor,OUTPUT); pinMode( Rmotor,OUTPUT);}void loop() { //将你的主代码放在这里,以便重复运行。digitalWrite(Fmotor,HIGH);//使汽车直行的代码 digitalWrite(Lmotor,HIGH); digitalWrite(Rmotor,LOW);//千万不要把两个引脚上的马达都设为高电平 digitalWrite(Bmotor,LOW); delay(5000); digitalWrite(Rmotor,HIGH); //向右转 digitalWrite(Lmotor,LOW);digitalWrite(Bmotor,LOW); digitalWrite(Fmotor,HIGH); delay(800); digitalWrite(Fmotor,HIGH);//使汽车直行的代码 digitalWrite(Lmotor,HIGH); digitalWrite(Rmotor,LOW); digitalWrite(Bmotor,LOW); delay(5000);}
- 3启动汽车。把车放在一个平面上。放入电池,看着它开动!如果你的电池座有一个开关,拨动它来打开和关闭汽车。你可以添加你自己的开关,把电池座的正极线连接到SPST(单极单掷)开关的中心针。将开关的另一个针脚连接到Arduino的Vin针脚。
- 4玩转代码。改变代码中的数值,并上传你的新程序,以改变你的车的行为。试着改变 "延迟 "后面的数字,或者看看当你把低电平改为高电平或反之亦然时会发生什么。只要确保不把一个电机的两个引脚同时设置为高电平就可以了。

- 在代码中,//符号后面的文本片段是注释。用这个来弄清每段代码的作用。
- 如果你的车没有按照你预期的方式行驶,可以试着调换Lmotor和Rmotor的值,或者Fmotor和Bmotor的值。
- 发表于 2022-03-10 17:26
- 阅读 ( 77 )
- 分类:IT
你可能感兴趣的文章

乐高迷的13件最佳礼物
... 1乐高助推机器人建筑套装 ...
100美元以下的7款最佳机械臂套件
... 以下的机器人手臂套件将花费不到100美元(至少在亚马逊)。 ...
第一批苹果汽车可能是自动驾驶的robotaxis
...全自主驾驶的好处之前,该车可能会首先瞄准食物输送和机器人操作。如果这是真的,那苹果公司就成了特斯拉的靶子。据首席执行官埃隆•马斯克(elonmusk)称,特斯拉自己有一天可能会成为一家自动驾驶的机器人旅行社。 ...

周末:揭示俄罗斯,管理机器人,骑着瑞诺
欢迎来到边缘:周末版。每周六,我们都会为您带来过去七天中最精彩、最重要的读物,从原创报道,到深度特写,再到评论和访谈。把它看作是我们最喜欢的一些你可能错过的作品的集合,或者你可能只是想再读一...

周末:摇摇欲坠的科学,可靠的机器人,令人难忘的穆扎克
欢迎来到边缘:周末版。每周六,我们都会为您带来过去七天中最精彩、最重要的读物,从原创报道,到深度特写,再到评论和访谈。把它看作是我们最喜欢的一些你可能错过的作品的集合,或者你可能只是想再读一...
周末:购买节拍,更新即将到来的节拍,制作道德机器
欢迎来到边缘:周末版。每周六,我们都会为您带来过去七天中最精彩、最重要的读物,从原创报道,到深度特写,再到评论和访谈。把它看作是我们最喜欢的一些你可能错过的作品的集合,或者你可能只是...
科技新闻时代胶囊:1996年计算机的奇妙世界
... 《机器人、蜘蛛和其他网络上阴暗的居民指南》 PC杂志,1996年7月 If you maintain a site on the World Wide Web, have you ever been "hit" repeatedly by a user who downloads tens, perhaps hundr...

认识优步的第一辆自动驾驶汽车
...卡内基梅隆大学(Carnegie Mellon University)等地挖走的一组机器人专家正在研究自动驾驶技术。 此外,匹兹堡多样化的环境使其成为一个测试的好地方,因为它为其机器人汽车的导航设置了很多障碍。空管部门负责人约翰...

观看这台无人驾驶的自动推土机挖掘泥土
...。 与Waymo和GM等公司运营的自动驾驶汽车非常相似,这些机器人推土机和反铲使用激光雷达和GPS等传感器“观察”周围的世界。但与目前在加州或亚利桑那州行驶的自动驾驶汽车不同的是,这些重型搬运车使用专门设计的传感器...

什么是机械臂?(a robotic arm?)
... 第一个机器人手臂是由一位名叫乔治·德沃尔的科学家在20世纪50年代开发的,在此之前,机器人技术主要是科幻小说和想象的产物。机器人技术的发展缓慢了一段时间,许多最有...
0 篇文章





