如何在家建造机器人(build a robot at home)
第1部分 6的第1部分:组装机器人
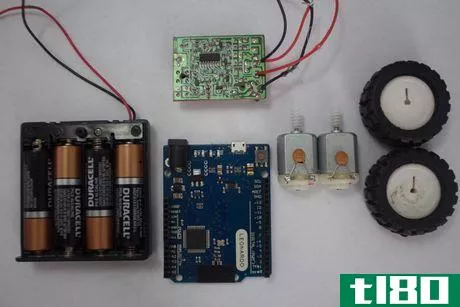
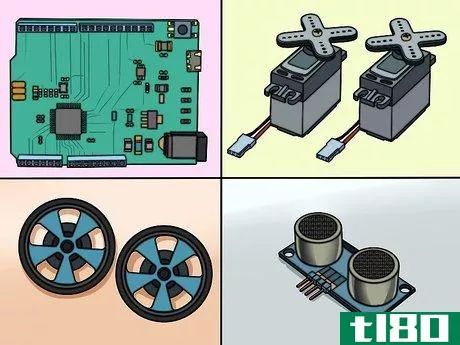
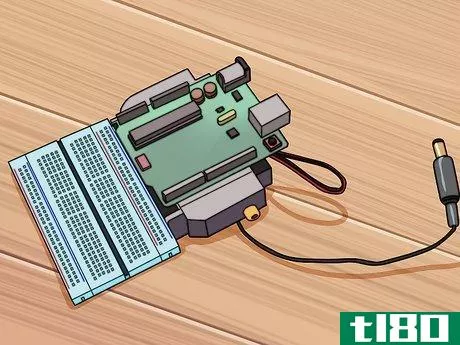
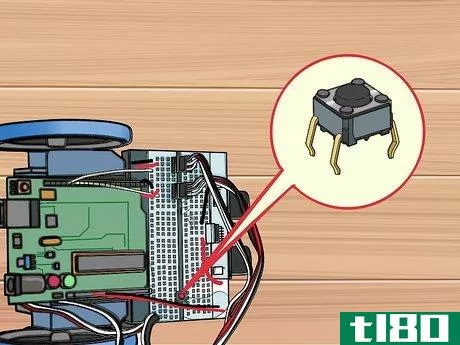
- 1收集你的部件。要建造一个基本的机器人,你需要几个简单的部件。你可以在当地的电子爱好者商店或一些在线零售商那里找到大多数(如果不是全部)这些部件。一些基本套件可能还包括所有这些组件。这个机器人不需要任何焊接。Arduino Uno(或其他微控制器)2个连续旋转的舵机2个适合舵机的轮子1个脚轮1个小型无焊面包板(寻找每侧有两条正负线的面包板)1个距离传感器(带四针连接器电缆)1个迷你按钮开关1个10kΩ电阻1个USB A至B电缆1套分离头1个带9V直流电源插孔的6×AA电池座1包跳线或22号连接线结实的双面胶或热胶
- 2将电池组翻过来,使平坦的背面朝上。你将用电池组作为基础来建造机器人的身体。
- 3对准电池组一端的两个舵机。舵机的底部应该相接,每个舵机的旋转机构应该朝向电池组的两侧。舵机必须正确对齐,使轮子走直。舵机的电线应该从电池组的后面出来。
- 4用你的胶带或胶水固定舵机。确保它们牢固地连接到电池组上。舵机的背面应该与电池组的背面齐平。舵机现在应该占到电池组的后半部分。
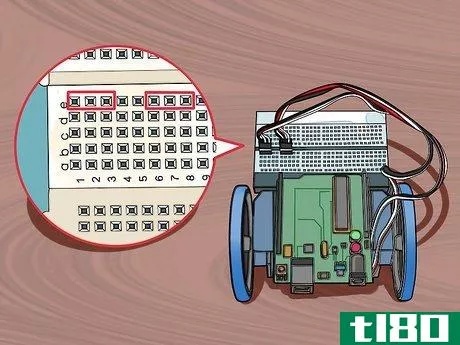
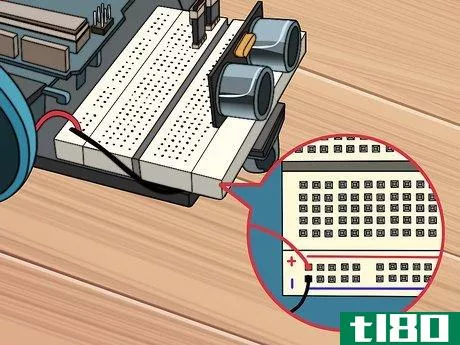
- 5. 将面包板垂直地固定在电池组的开放空间上。它应该悬挂在电池组的前面一点,并将延伸到每一边。确保在继续进行之前牢牢地固定住。A "行应该是最接近舵机的地方。
- 6将Arduino微控制器连接到舵机的顶部。如果你正确地连接了舵机,它们之间应该有一个平面空间。将Arduino板贴在这个平面上,使Arduino的USB和电源接口朝向后面(远离面包板)。Arduino的正面应该刚好与面包板重叠。
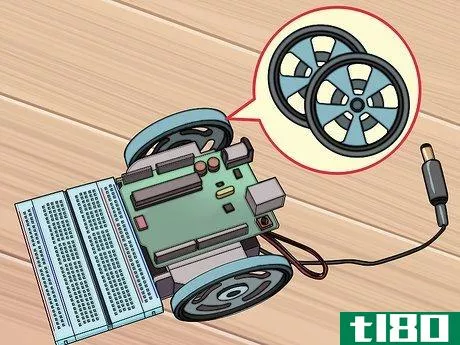
- 7将轮子放在舵机上。将轮子牢牢地压在舵机的旋转机构上。这可能需要很大的力气,因为轮子的设计是为了尽可能紧密地配合以获得最佳的牵引力。
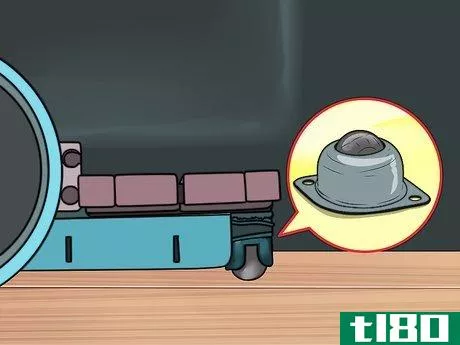
- 8将脚轮连接到面包板的底部。如果你把机箱翻过来,你应该看到有一点面包板延伸到电池组之后。将脚轮连接到这块延伸的地方,如果有必要的话,可以使用立管。脚轮起到了前轮的作用,使机器人可以轻松地转向任何方向。如果你买的是套件,脚轮可能带有一些立管,你可以用它来确保脚轮到达地面。
第二部分 6的第二部分:为机器人布线
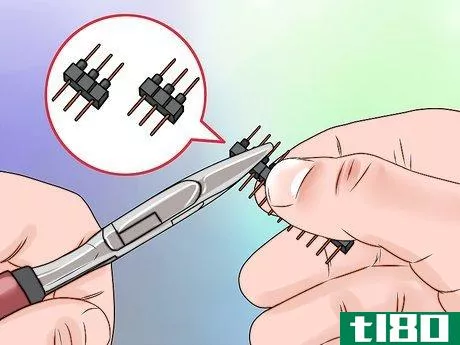
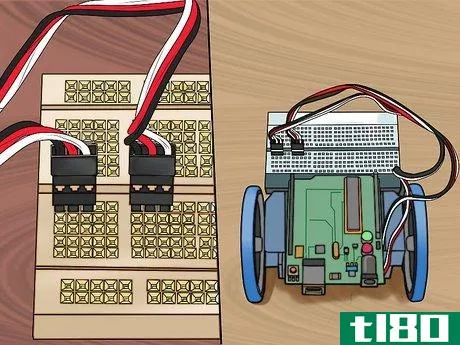
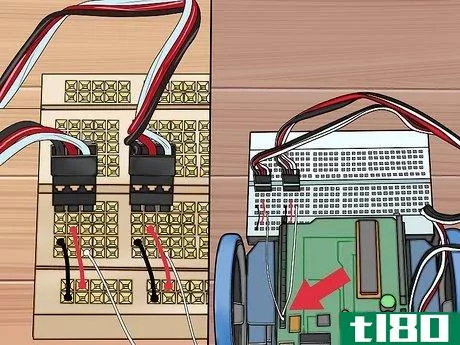
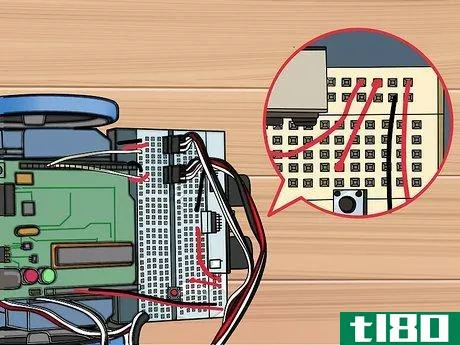
- 1.拆下两个3针头。你将用它们来连接舵机和面包板。将针脚向下推,使针脚在两边的距离相等。
- 2将两个针座插入面包板E行的1-3和6-8针脚。确保它们被牢固地插入。
- 3将舵机电缆连接到针座上,黑色电缆在左侧(针脚1和6)。这将把舵机连接到面包板上。确保左边的舵机连接到左边的接头,右边的舵机连接到右边的接头。
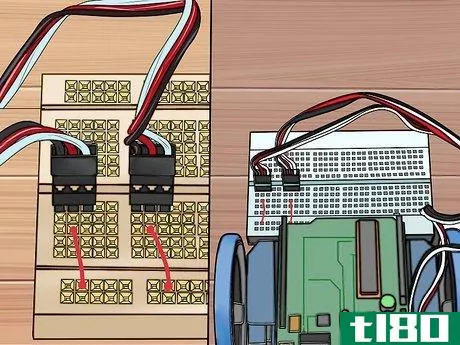
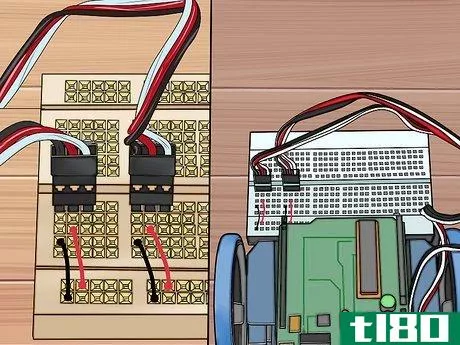
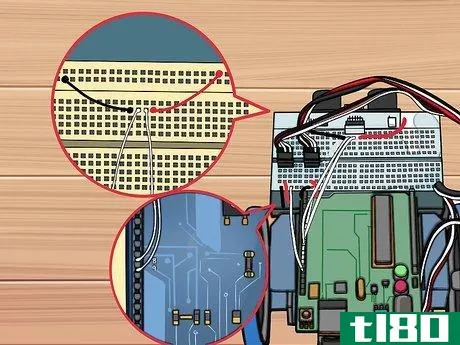
- 4将红色跳线从C2和C7引脚连接到红色(正)轨道引脚。确保你使用面包板背面的红色轨道(更接近于机箱的其他部分)。
- 5将黑色跳线从B1和B6针脚连接到蓝色(地)轨道针脚。确保你使用面包板背面的蓝色轨道。不要把它们插入红色轨道的引脚。
- 6将白色跳线从Arduino的12和13号针脚连接到A3和A8。这将使Arduino能够控制舵机并转动车轮。
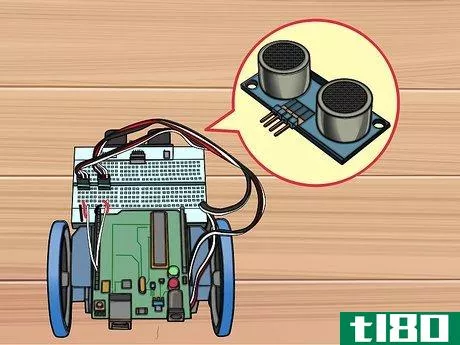
- 7将传感器连接到面包板的前面。它不会被插入面包板上的外部电源轨,而是插入第一排带字母的引脚(J)。确保你把它放在准确的中心位置,每边有相同数量的引脚可用。
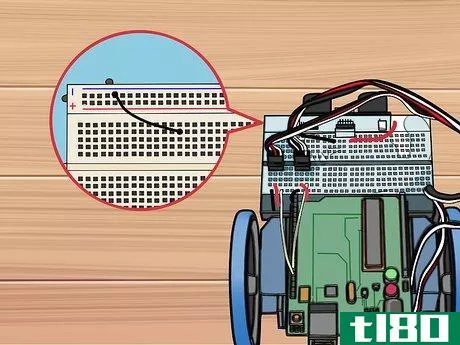
- 8将一根黑色跳线从I14针脚连接到传感器左侧第一个可用的蓝色轨道针脚。这将使传感器接地。
- 9将一根红色跳线从I17针脚连接到传感器右侧第一个可用的红色轨道针脚。这将为传感器供电。
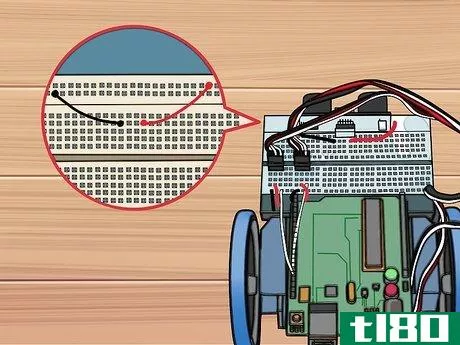
- 10连接白色跳线,从I15针到Arduino的9针,从I16针到8针。这将把信息从传感器输送到微控制器。
第3部分 6的第3部分:为权力布线
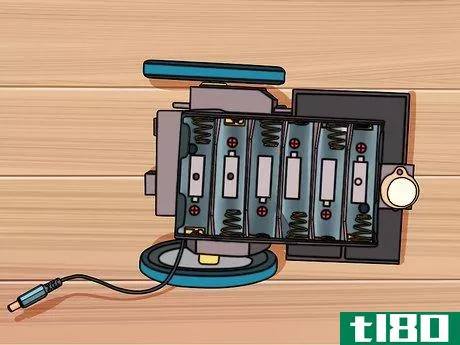
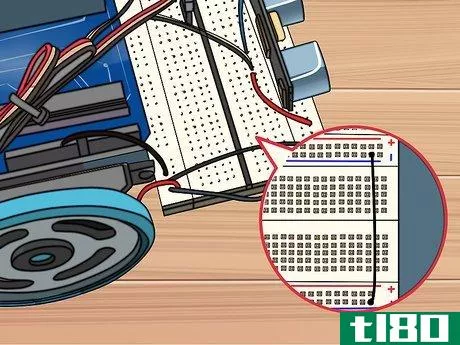
- 1将机器人侧翻,以便您能看到电池组中的电池。调整方向,使电池组的电缆从底部向左伸出。
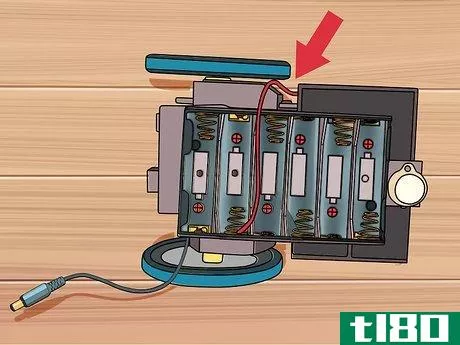
- 2将一根红线连接到底部从左起第二个弹簧上。确保电池组的方向正确。
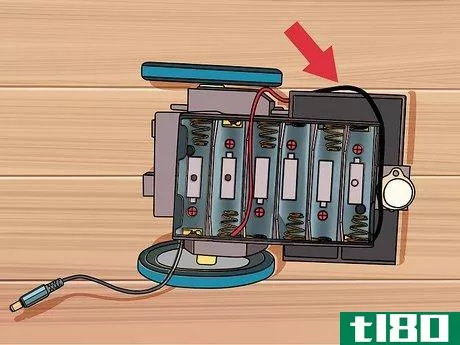
- 3将一条黑线连接到右下角的最后一个弹簧上。这两条线将有助于向Arduino提供正确的电压。
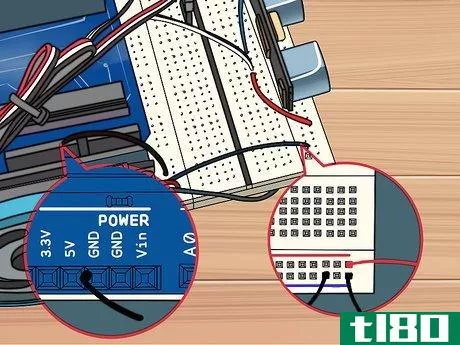
- 4将红色和黑色的线连接到面包板背面最右边的红色和蓝色引脚。黑线应插入蓝轨的30号针脚。红线应插入红色轨道的第30针。
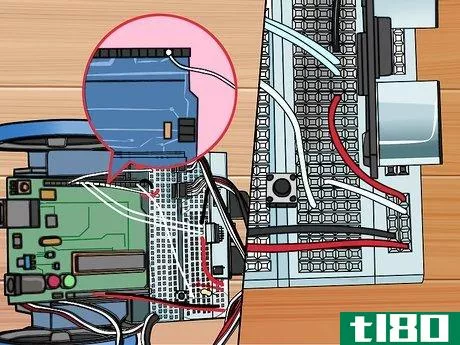
- 5从Arduino上的GND引脚连接一条黑线到后面的蓝色轨道。在蓝色轨道的第28针上连接。
- 6从后面的蓝轨到前面的蓝轨在第29针处各连接一根黑线。不要连接红色轨道,因为你可能会损坏Arduino。
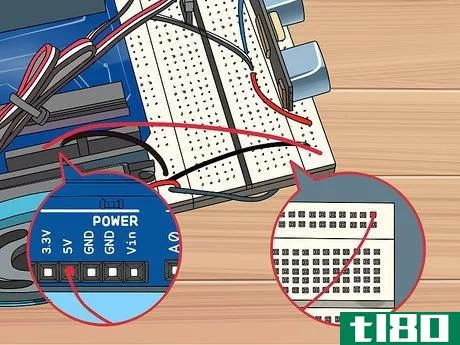
- 7从前面红色轨道的第30针连接一条红线到Arduino的5V针。这将为Arduino提供电源。
- 8将按钮开关插入24-26号引脚的行间空隙中。这个开关将允许你在不拔掉电源的情况下关闭机器人。
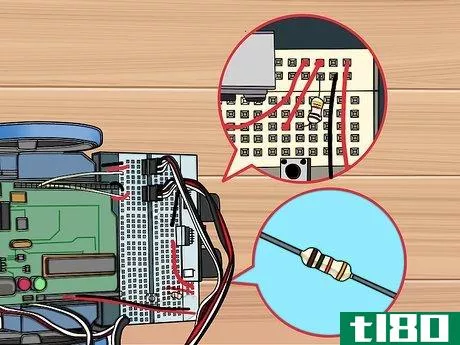
- 9从H24连接一根红线到传感器右侧下一个可用的针脚中的红色轨道。这将为按钮供电。
- 10使用电阻将H26连接到蓝色轨道上。把它连接到你在几步之前连接的黑线旁边的直接引脚。
- 11从G26连接一条白线到Arduino的第2针。这将使Arduino能够注册该按钮。
第4部分 第4部分6:安装Arduino软件
- 1下载并提取Arduino IDE。这是Arduino开发环境,允许你对指令进行编程,然后上传到你的Arduino微控制器。你可以从arduino.cc/en/main/software免费下载它。通过双击下载的文件进行解压,并将里面的文件夹移到一个容易访问的位置。你将不会真正安装这个程序。相反,你只是通过双击arduino.exe从解压的文件夹中运行它。
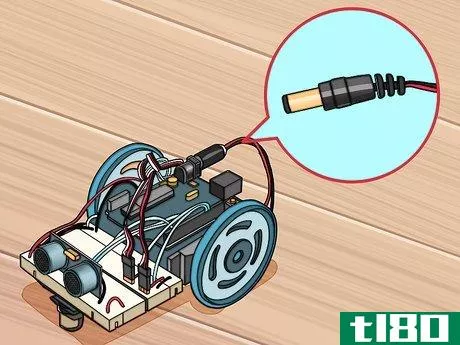
- 2将电池组连接到Arduino上。将电池背上的插孔插入Arduino上的连接器,给它供电。
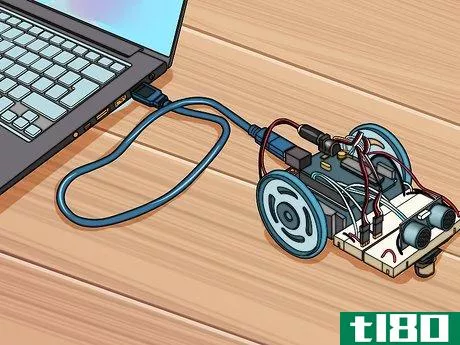
- 3通过USB将Arduino插入你的电脑。Windows可能无法识别该设备。
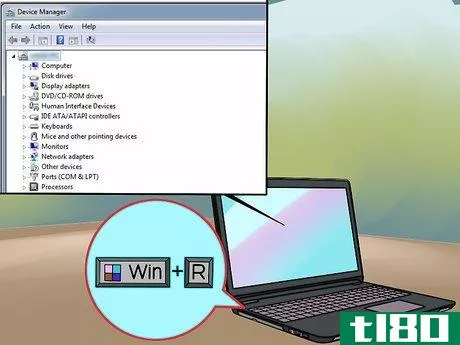
- 4按.⊞ Win+R并输入devmgmt.msc。这将启动 "设备管理器"。
- 5在 "其他设备 "部分的 "未知设备 "上点击右键,选择 "更新驱动软件"。如果你没有看到这个选项,请点击 "属性",选择 "驱动程序 "标签,然后点击 "更新驱动程序"。
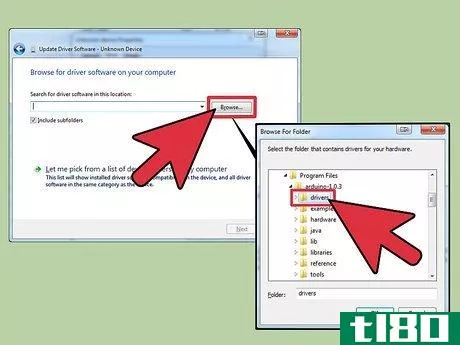
- 6选择 "浏览我的电脑,寻找驱动软件"。这将允许你选择Arduino IDE附带的驱动程序。
- 7点击 "浏览",然后导航到你之前提取的文件夹。你会发现里面有一个 "驱动 "文件夹。
- 8选择 "驱动程序 "文件夹并点击 "确定"。如果你被警告说有未知软件,请确认你要继续。




第5部分 第6部分:机器人编程
- 1通过双击IDE文件夹中的arduino.exe文件启动Arduino IDE。你将会看到一个空白的项目。
- 2粘贴以下代码,使你的机器人直线前进。下面的代码将使你的Arduino连续向前移动。#include <Servo.h> //这将 "Servo "库添加到程序中//下面创建两个伺服对象Servo leftMotor;Servo rightMotor;void setup(){ leftMotor.attach(12); //如果你不小心调换了伺服的引脚号码,你可以在这里调换号码rightMotor.attach(13);}void loop(){ leftMotor.write(180); //在连续旋转的情况下,180告诉伺服全速前进。attach(13);}void loop(){ leftMotor.write(180); // 在连续旋转的情况下,180告诉舵机以全速 "向前 "移动。 rightMotor.write(0); // 如果这两个数字都是180,机器人会走一个圈,因为舵机是翻转的。"0,"告诉它全速 "向后 "移动。" }
- 3建立和上传程序。点击左上角的右箭头按钮,建立并上传程序到连接的Arduino.你可能想把机器人从表面抬起来,因为一旦程序被上传,它就会继续向前移动。
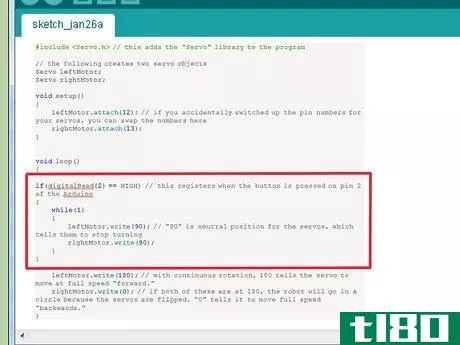
- 4.添加杀毒开关功能。在你的代码的 "void loop() "部分添加以下代码,以启用杀伤开关,在 "write() "函数上方。if(digitalRead(2) == HIGH)//当按钮在Arduino的2号针脚上被按下时,这将被记录下来{ while(1) { leftMotor.write(90); // "90 "是舵机的中性位置,它告诉它们停止转动 rightMotor.write(90); }}.
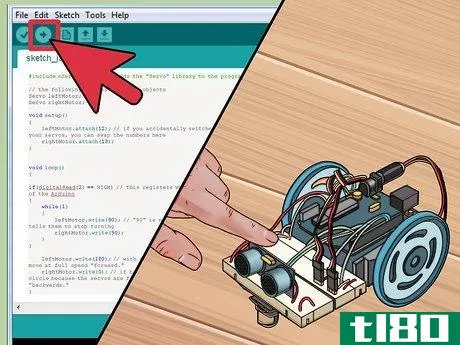
- 5上传并测试你的代码。添加了杀死开关的代码后,你可以上传并测试机器人。它应该继续向前行驶,直到你按下开关,这时它将停止移动。完整的代码应该是这样的:#include <Servo.h>//下面创建两个伺服对象Servo leftMotor;Servo rightMotor;void setup(){ leftMotor.attach(12); rightMotor.attach(13); }void loop(){ if(digitalRead(2) == HIGH){ while(1) { leftMotor.write(90); rightMotor.write(90); }} leftMotor.write(180); rightMotor.write(0); }

第6部分 第6部分:实例
- 1跟随一个例子。下面的代码将使用连接在机器人上的传感器,使其在遇到障碍物时向左转。关于每个部分的作用,请看代码中的注释。下面的代码是整个程序的内容。#include <Servo.h>Servo leftMotor;Servo rightMotor;const int serialPeriod = 250; //这限制了对控制台的输出,每1/4秒一次unsigned long timeSerialDelay = 0;const int loopPeriod = 20; //这将传感器的读数频率设置为20ms,即50Hzunsigned long timeLoopDelay = 0;//这将TRIG和ECHO功能分配给Arduino的引脚。如果你的连接方式不同,请对这里的数字进行调整const int ultrasonic2TrigPin = 8;const int ultrasonic2EchoPin = 9;int ultrasonic2Distance;int ultrasonic2Duration;//这定义了机器人的两种可能状态:向前行驶或向左转#define DRIVE_FORWARD 0#define TURN_LEFT 1int state = DRIVE_FORWARD; // 0 =向前行驶(默认),1 =向左转void setup() { Serial.begin(9600); //这些传感器的引脚配置 pinMode(ultrasonic2TrigPin, OUTPUT); pinMode(ultrasonic2EchoPin, INPUT); //这将马达分配给Arduino引脚 leftMotor.attach(12); rightMotor.attach(13); }void loop(){ if(digitalRead(2) == HIGH)//这就检测到了杀人开关 { while(1) { leftMotor.write(90); rightMotor.write(90); }} debugOutput(); // 这将调试信息打印到串行控制台 if(millis() - timeLoopDelay >= loopPeriod) { readUltrasonicSensors(); // 这指示传感器读取并存储测量距离 stateMachine();timeLoopDelay = millis(); }}void stateMachine(){ if(state == DRIVE_FORWARD) // 如果没有检测到障碍物 { if(ultrasonic2Distance > 6 || ultrasonic2Distance < 0) // 如果机器人前面没有东西。ultrasonicDistance对于某些超声波来说将是负数,如果没有障碍物 { //向前驱动 rightMotor.write(180); leftMotor.write(0); } else //如果前面有一个物体 { state = TURN_LEFT; }} else if(state == TURN_LEFT) //如果检测到有障碍物,就向左转 { unsigned long timeToTurnLeft = 500; //转90度大约需要0.5秒。如果你的轮子与例子中的大小不同,你可能需要调整这个时间 无符号长turnStartTime = millis(); //保存我们开始转动的时间 while((millis()-turnStartTime) < timeToTurnLeft) //停留在这个循环中直到timeToTurnLeft过后 { //向左转,记住,当两者都被设置为 "180 "时,它将转动。rightMotor.write(180); leftMotor.write(180); } state = DRIVE_FORWARD; }}void readUltrasonicSensors(){ //这是针对超声波2的。 如果你使用不同的传感器,你可能需要改变这些命令。digitalWrite(ultrasonic2TrigPin, HIGH); delayMicroseconds(10); //保持trig pin高电平至少10微秒 digitalWrite(ultrasonic2TrigPin, LOW); ultrasonic2Duration = pulseIn(ultrasonic2EchoPin, HIGH); ultrasonic2Distance = (ultrasonic2Duration/2)/29; }//下面是在控制台调试错误。void debugOutput(){ if((millis() - timeSerialDelay) > serialPeriod) { Serial.print("ultrasonic2Distance: " ); Serial.print(ultrasonic2Distance); Serial.print("cm"); Serial.println(); timeSerialDelay = millis(); }}
- 发表于 2022-03-10 17:29
- 阅读 ( 103 )
- 分类:IT
你可能感兴趣的文章

irobot宣布推出名为terra的免提自动割草机
...bot是一家以生产Roomba而闻名的公司,Roomba是世界上最好的机器人吸尘器之一,随着Terra的发布,iRobot正打算投身于草坪护理行业。很像该公司选择的室内清洁剂,这种设备将自动切断它的方式在你的院子里,使一个小杂务,你需...

roomba的机器人吸尘器在不久的将来可以长出手臂
iRobot是广受欢迎的机器人吸尘器Roomba的**商,他说,他们正在研制一种圆盘状的有手臂的家用帮手。该公司设想推出一款软木版的Roomba,它可以帮助完成更复杂的任务,比如洗衣、洗碗和上菜。 这家位于马萨诸塞州的...

周末:摇摇欲坠的科学,可靠的机器人,令人难忘的穆扎克
欢迎来到边缘:周末版。每周六,我们都会为您带来过去七天中最精彩、最重要的读物,从原创报道,到深度特写,再到评论和访谈。把它看作是我们最喜欢的一些你可能错过的作品的集合,或者你可能只是想再读一...

周末:印刷大脑和制造机器人
欢迎来到边缘:周末版。每周六,我们都会为您带来过去七天中最精彩、最重要的读物,从原创报道,到深度特写,再到评论和访谈。把它看作是我们最喜欢的一些你可能错过的作品的集合,或者你可能只是想再读一遍。 ...

庆祝之城的住宅风格
...这一小部分房屋时,问问自己——你还会要求什么,它将如何改变社区? 来源 注:房屋地址已在谷歌地图上验证。每栋房屋的详细信息摘自设计指南:地块、建筑商、房屋平面图和;架构参考,截至2009年12月23日,由克罗地...

什么是服务机器人?(a service robot?)
... 服务机器人是能够为主人提供服务的机器人。这些机器人通常是自主的,但可以通过内置系统远程或手动控制。它们也可能与WiFi家庭网络或智能环境同步。 ...

什么是决定房屋建筑价格的因素是什么?(the factors that determine home building prices?)
...需进行最低限度的现场准备,现场已经有公用设施,人们在家工作时很容易接触到。另一些可能需要修建进场道路、铺设公用设施线路,并进行大量工作,以使场地做好建设准备,从而导致房屋建筑价格上涨。 ...

如何我做机器人?(i make a robot?)
... 有许多不同类型的机器人,但每一种都使用相同的基本元素。每个机器人的四个基本部分是机械、电子和编程。建筑商应确定机器人项目的目的,并将这四个类别的组件组合起来,以完成装...

什么是建造家庭酒吧的最佳建议是什么?(the best tips for building a home bar?)
... 在翻新地下室或娱乐室时,建造家庭酒吧可能是最重要的成就之一。根据酒吧里想要的功能,这个项目可能相当简单,也可能相对复杂。不管是哪种方式,在开始之前有几件事需要注意,这有助于使...

如何我建造一个移动式家庭门廊?(i build a mobile home porch?)
与非移动房屋门廊前面的门廊不同,移动房屋门廊是一个独立的结构,不与移动房屋...
0 篇文章