飞行时间和激光雷达有什么区别?
最近,围绕着苹果新设备上的激光雷达,人们议论纷纷,以至于人们很容易忘记,移动增强现实可以以任何其他方式工作。但它可以而且确实如此,特别是随着ToF工具在三星**中达到新的高度。

无论你是一个开发人员,在一个新的设备市场,或只是好奇,这是值得花一些时间来解开这些缩写词和学习的细节移动电话深度感应。
什么是飞行时间(tof)?
飞行时间是飞行时间的缩写。
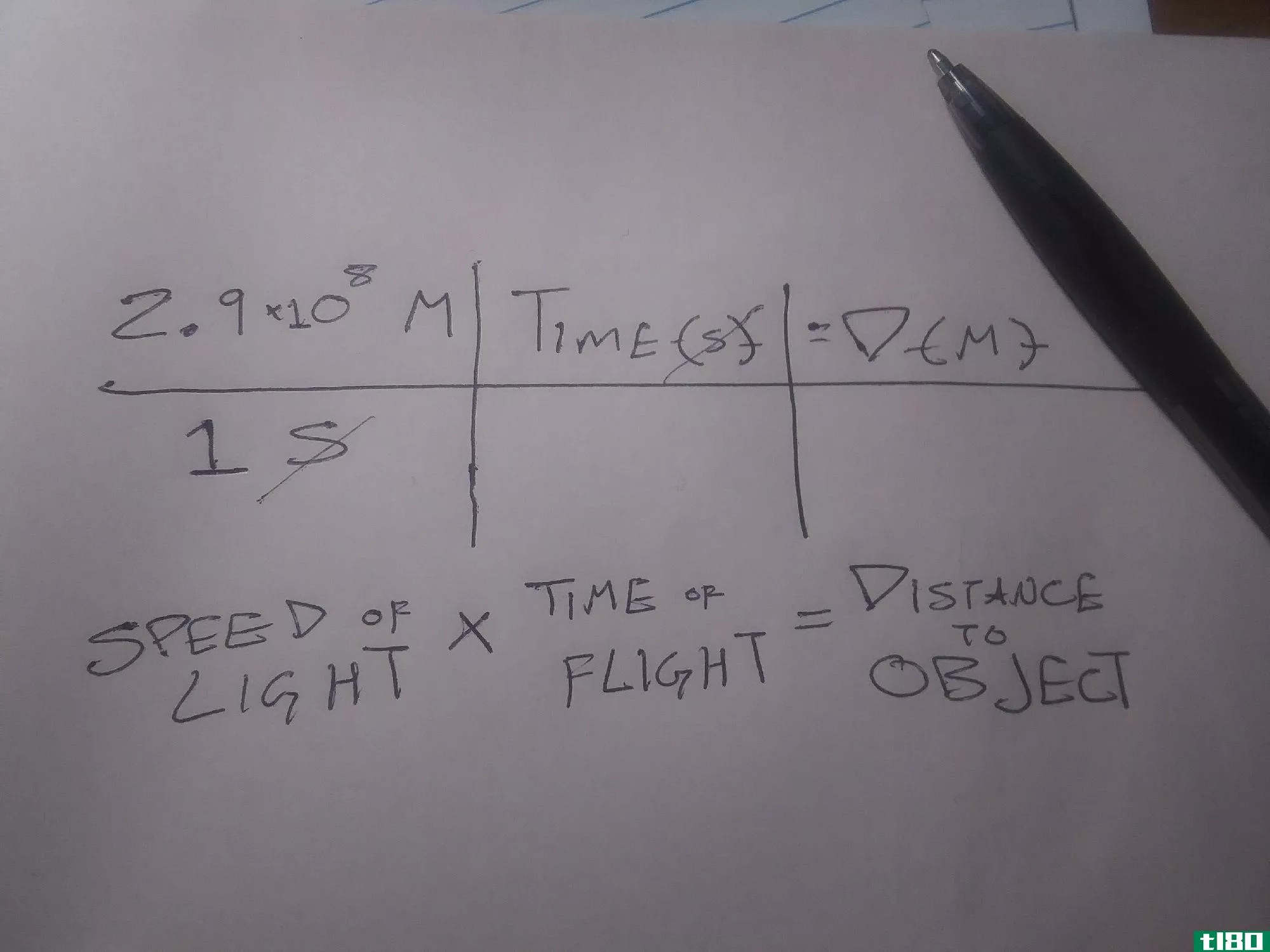
从技术上讲,ToF指的是利用光速(甚至声速)来确定距离。它测量光(或声音)离开设备、从物体或平面反弹并返回设备所需的时间,所有时间除以2表示设备到物体或平面的距离。
所以,关系是所有的激光雷达都是一种战斗时间,但不是所有的飞行时间都是激光雷达。为了简单起见,当我们谈论“飞行时间”时,我们指的是光学距离测量,不包括激光雷达。
那么,如果激光雷达和光学非激光雷达飞行时间都使用光进行距离测定和三维测绘,它们有什么不同呢?
什么是激光雷达(lidar)?
激光雷达是光探测和测距的缩写。这项技术使用一个激光器,或一个激光栅格,作为上述公式中的光源。
一个激光雷达读数可以用来测量一个房间的宽度,但多个激光雷达读数可以用来创建“点云”。这些可以用来创建物体的三维模型或整个区域的地形图。
虽然激光雷达对移动设备来说可能是新技术,但这项技术本身已经存在了相当长的一段时间。在非移动环境中,激光雷达被用于绘制水下环境图和发现考古遗址等一切工作。
激光雷达和飞行时间有何不同?
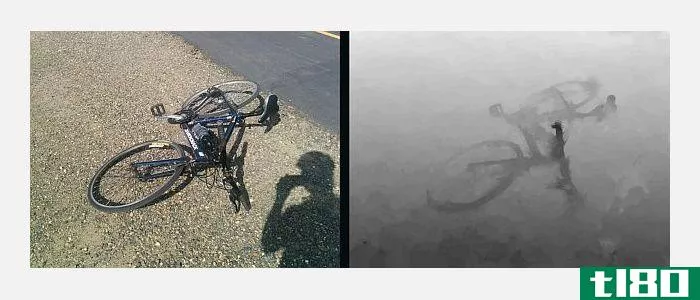
激光雷达与其他飞行时间形式的功能区别在于,激光雷达使用脉冲激光建立点云,然后用点云构建三维地图或图像。ToF应用程序通常通过一个标准的RGB相机,基于光检测创建“深度图”。
与激光雷达相比,ToF的优势在于,ToF需要较少的专用设备,因此可以与更小、更便宜的设备一起使用。激光雷达的好处在于,与深度图相比,计算机可以轻松读取点云。
Google为Android设备创建的Depth API最适用于支持ToF的设备,它通过创建深度图和识别“特征点”来工作。这些特征点通常是不同光强度之间的屏障,然后被用来识别环境中的不同平面。这实际上创建了一个较低分辨率的点云。
飞行时间和激光雷达如何与移动雷达协同工作
深度图和点云很酷,对于某些人和应用程序来说,它们已经足够了。然而,对于大多数AR应用程序,这些数据必须被上下文化。ToF和LiDAR都是通过与移动设备上的其他传感器协同工作来实现的。具体来说,这些平台需要了解您**的方向和移动。
了解设备在地图环境中的位置被称为同步定位和地图,或称为“SLaM”。SLaM用于其他应用,如自动车辆,但基于移动的AR应用最有必要在物理环境中放置数字对象。
这对于那些在用户不与他们交互的情况下仍然存在的体验,以及放置在物理人和物理对象后面的数字对象来说尤其如此。
在基于激光雷达和ToF的应用中放置数字物体的另一个重要因素是“锚”,锚是物理世界中数字点,数字对象被“附着”
在Pokemon Go这样的世界级应用程序中,这是通过一个称为“地理标记”的单独过程完成的。然而,在基于移动的AR应用程序中,数字对象被锚定到LiDAR点云中的点或深度地图上的一个特征点。
激光雷达比飞行时间好吗?
严格地说,激光雷达比飞行时间更快更精确。然而,这在技术更先进的应用中变得更加重要。
例如,ToF和Google的Depth API很难理解像白墙这样大而低的纹理平面。这使得使用此方法的应用程序很难在物理世界的某些表面上精确放置数字对象。使用激光雷达的应用不太可能有这个问题。
然而,涉及更大或更多纹理变化的环境的应用程序不太可能有这个问题。此外,大多数基于移动的消费者AR应用程序都涉及到在用户的脸或身体上使用AR过滤器,而这种应用程序不太可能因为大的无纹理表面而遇到问题。
为什么苹果和谷歌使用不同的深度传感器?
在发布与激光雷达兼容的设备时,苹果表示,为了“开放更多专业工作流程,支持专业照片和视频应用程序”,他们将传感器和其他硬件都包括在内。发布还称与激光雷达兼容的iPad pro为“世界上最好的增强现实设备”,并吹捧苹果的测量应用程序。
谷歌还没有给出如此直接的解释,为什么他们的深度API和新的支持设备系列不使用激光雷达。除了围绕激光雷达工作,使Android设备更轻、更实惠之外,还有一个主要的可访问性优势。
由于Android在多家公司生产的移动设备上工作,使用LiDAR将有利于与LiDAR兼容的机型,而牺牲了所有其他机型。此外,因为它只需要一个标准的摄像头,所以Depth API向后兼容更多的设备。
事实上,Google的Depth API与设备无关,这意味着使用Google的AR体验构建平台的开发者也可以开发在苹果设备上工作的体验。
你探索过深度感应吗?
本文主要关注基于移动的雷达体验中的激光雷达和飞行时间。这在很大程度上是因为这些更复杂的经历需要最多的解释。这也是因为这些经历是最有趣和最有前途的。
然而,像这样的深度感知方法是许多更简单、更实用的经验和工具的基础,你可能每天都在使用这些经验和工具,而不用花太多心思。希望通过阅读ToF和LiDAR能让你对这些应用有更多的了解。
- 发表于 2021-03-29 13:21
- 阅读 ( 213 )
- 分类:IT
你可能感兴趣的文章

tiktok为iphone用户推出首款激光雷达效果
...iphone13系列。激光雷达(光探测和测距)使用脉冲激光和飞行时间计算来测量光从物体反射所需的时间,从而生成精确的周围环境深度图。 ...

苹果将把它的激光雷达扫描仪带到整个iphone13系列中
... 相关报道:飞行时间与激光雷达:有什么区别 ...

什么是激光雷达?它是如何工作的?
...GPS装置组成。对于航空激光雷达,一个附加的装置会影响飞行器的角度和速度。 ...

沃尔沃将在2022年前向客户销售装有激光雷达的自动驾驶汽车
...lestar 3 SUV和XC40充电。 根据沃尔沃的描述,高速公路飞行员听起来像是流行的高级驾驶辅助系统(ADAS)的增强版,如特斯拉的自动驾驶仪或凯迪拉克的超级巡航。不过,最大的区别在于,这些系统要求驾驶员“保持在环路...

激光雷达传感器不再仅仅适用于自动驾驶汽车
...的车辆,模拟行人。他们的发现令人震惊:这些假人60%的时间是在白天以每小时20英里的速度横穿马路时被击中的。 Velodyne的Gopalan说,激光雷达有可能使这些系统更安全。他说:“如果有明亮的阳光,或者晚上真的很暗,这些(...

观看有史以来第一个激光束穿过稀薄空气的视频
科学家们首次捕捉到激光在空中飞行轨迹的视频。上面的片段是用一种新的超高速相机**的,这种相机能够一次探测到单个光子——尽可能少的光量。为了**这段视频,英国爱丁堡赫里奥瓦特大学的研究人员在10分钟的时间内记...

新型可改装无人机可以帮助研究人员扫描不断变化的南极冰架
...机器公司生产的。提布龙是一种重量高达55磅的无人驾驶飞行器,它可以携带雷达仪器为研究人员扫描盖子,使飞行员免于危险的壮举。 这种无人机不仅可以用来扫描北极帽 它并不是第一架帮助研究地球北极地区的无人...
这个微小的芯片可能是机器人视觉的未来
...界中工作,就需要一双像样的眼睛。通常,这项工作是由激光雷达来完成的,激光雷达是一种将附近表面的光线反射出来,从而生成周围世界的三维地图的技术。激光雷达在其基本原理上和雷达一样,但由于它使用的是光,而不...

遥感概述
...美国内战期间信鸽、风筝和无人驾驶气球在敌方领土上空飞行,并附有摄像机。 第一批由政府组织的航空摄影任务是在第一次和第二次世界大战期间为军事监视而开发的。然而,正是在冷战期间,遥感得到了最广泛的应用。这...

什么是雷达探测器?(a radar detector?)
...号以光速移动,因此计算机单元可以计算信号返回所需的时间。如果目标物体正朝着雷达炮移动,由于一种称为多普勒频移的现象,频率会变得更高。这意味着一辆行驶中的警车可以准确计算接近它的汽车的速度。警察不必在公...
0 篇文章




