什么是笛卡尔机器人?(a cartesian robot?)

笛卡尔机器人,也称为笛卡尔坐标机器人,是一种常见的工业机器人。它有三个“臂”,每个“臂”沿控制的线性轴运行。这些轴中的每一个都与其他两个轴成直角。笛卡尔机器人的一个常见应用是计算机数控(CNC)机器,它可以有多种用途,特别是作为铣床或绘图机。
笛卡尔机器人的基本形式由三个“手臂”组成每个手臂只能沿二维轴移动-它只能向后或向前移动,如果手臂是垂直的,则只能向上或向下移动。然而,每只手臂与另两只手臂成直角,这使得机器人能够利用所有三只手臂的运动到达三维空间中的各个点。根据机器人的用途,这些手臂的大小可能会有很大的变化。在一些特别大的设计中,水平臂两端都有支撑。这就是所谓的龙门机器人。。
笛卡尔机器人相对于其他类型的工业机器人的主要优势在于,其所有三个控制轴都是线性的,而不是旋转的。具有线性控制轴是一个优势,因为它大大简化了机器人的手臂解决方案。为了对机器人进行特定任务的编程,程序员必须能够对机器人进行编程,使其沿着控制轴移动,以达到各种所需的位置。确定此手臂解决方案需要计算以确定相对于机器人控制轴的所需位置。线性计算更容易计算,因为程序员可以使用基本的三角原理以闭合形式执行这些计算。。
由于笛卡尔机器人能够相对轻松地到达三维空间中的不同点,其最常见的应用是作为数控机床。数控机床使用计算机程序提取必要的命令,使机器人以所需的方式运行,然后将这些命令加载到机器人中。它们使机器人能够非常精确地移动,从而使笛卡尔机器人适用于不同的绘图和绘图功能。当笛卡尔机器人以这种方式使用时,工具可以在沿X和Y平面移动的同时降低到曲面上或升高到曲面上,以创建特定的设计。。
- 发表于 2021-12-30 06:03
- 阅读 ( 279 )
- 分类:互联网
你可能感兴趣的文章
笛卡尔坐标(cartesian coordinates)和极坐标(polar coordinates)的区别
笛卡尔坐标与极坐标 在几何学中,坐标系是一种参考系,其中数字(或坐标)用于唯一确定点或其他几何元素在空间中的位置。坐标系使几何问题转化为数值问题,为解析几何提供了基础。 笛卡尔坐标系和极坐标系是数学中...
什么是向量(a vector)
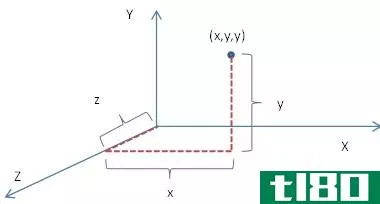
...们使用毕达哥拉斯定理: N. The angle is given by 如何在笛卡尔坐标系中表示向量 If the components of a vector along the , and axes are , and respectively, the vector can be written as . 如何求向量的大小 Magnitude refers to the size of the vec...

安卓(android)和半机械人(cyborg)的区别
...是人类。有许多类型的机器人,如三角洲,6轴,圆柱,笛卡尔等工业机器人有一个特定的角色,或履行职责。它的外表看起来不像人类,但可能有一部分看起来像人类一样的机械手。安卓(android) vs. 半机械人(cyborg)Android和半机械...

如何做一个番茄酱包笛卡尔潜水员(make a ketchup packet cartesian diver)
把一个番茄酱包放在一瓶水中,让它在你的命令下升降,就像变魔术一样。当然,魔术涉及一些基础科学,还有挤压瓶子。只要稍加练习,你就可以让人觉得你不是在挤瓶子。如果你把这个演示当作一个魔术,你可以说你是在...

什么是机械臂?(a robotic arm?)
... 第一个机器人手臂是由一位名叫乔治·德沃尔的科学家在20世纪50年代开发的,在此之前,机器人技术主要是科幻小说和想象的产物。机器人技术的发展缓慢了一段时间,许多最有...

什么是机器人摄像头?(a robotic webcam?)
机器人是一个独立的计算机系统,可以执行计算和物理行为,一个或多个手臂和关节有助于移动。网络摄像头是一种能够捕捉静止图像和视频的摄像头,设计用于计算机。...

什么是斯卡拉机器人?(a scara robot?)
...线上最受欢迎的机器人类型之一。它最接近的竞争对手是笛卡尔式机器人。笛卡尔式飞机比SCARA飞机占用更多的空间,但可以处理更重的有效载荷。SCARA机器人显然不擅长每项工作,但它在自己的领域内获得了高分。 ...

什么是串行机器人?(a serial robot?)
... 许多人在装配线上或电影中看到了连环机器人的动作。例如,帮助组装产品的机械臂。它是一个串联机器人,因为手臂的关节串联在一起,每个关节都有一个或多个电机或执行器连接到杆上,使手臂能够以人类...

什么是服务机器人?(a service robot?)
... 服务机器人是能够为主人提供服务的机器人。这些机器人通常是自主的,但可以通过内置系统远程或手动控制。它们也可能与WiFi家庭网络或智能环境同步。 ...

什么是个人机器人?(a personal robot?)
... 个人机器人是在人类主人的指导下用于管理日常任务的电子设备。最早的个人机器人商业模型发布于20世纪后半叶,主要面向为老年人和体弱者提供帮助。自21世纪初以来,技...
0 篇文章





