什么是slam?自动驾驶汽车怎么知道自己在哪里
同时定位和映射(SLAM)可能不是你每天都使用的短语。然而,一些最新的酷技术奇迹在其寿命的每一毫秒都使用这个过程。
什么是SLAM?为什么我们需要它?你说的这些很酷的技术是什么?
从缩略语到抽象概念
给你一个简单的游戏。哪一个不属于你?
- 自动驾驶汽车
- 增强现实应用程序
- 自主式空中和水下航行器
- 混合现实可穿戴设备
- Roomba酒店
你可能认为答案很容易就列在清单的最后一项。在某种程度上,你是对的。另一方面,这是一个诡计游戏,因为所有这些项目都是相关的。

这个(非常酷的)游戏的真正问题是:是什么让所有这些技术都可行?答案是:同步定位和映射,或者SLAM!就像那些酷孩子说的。
一般来说,SLAM算法的目的很容易迭代。机器人将使用同步定位和映射来估计其在空间中的位置和方向(或姿势),同时创建其环境的地图。这使得机器人能够识别自己的位置以及如何在未知空间中移动。
因此,是的,也就是说,所有这些花哨的**ancy算法所做的就是估计位置。另一种流行的技术,全球定位系统(GPS)自20世纪90年代第一次海湾战争以来一直在估计位置。
区分slam和gps
那么为什么需要一种新的算法呢?GPS有两个固有的问题。首先,虽然GPS相对于全球尺度是精确的,但相对于一个房间、一张桌子或一个小交点,精度和精度都会减小尺度。GPS的精度低到一米,但厘米是多少?毫米?
其次,GPS在水下工作不好。我说的不好是指一点也不好。同样,在厚混凝土墙的建筑物内,性能也是参差不齐的。或者在地下室。你明白了。全球定位系统是一种基于卫星的系统,受到物理限制。
所以SLAM算法的目的是为我们最先进的设备和机器提供更好的位置感。
这些设备已经有了一系列的传感器和外围设备。SLAM算法通过使用一些数学和统计学尽可能多地利用这些数据。
鸡肉还是鸡蛋?位置还是地图?
数学和统计学需要回答一个复杂的难题:位置是用来创建周围环境的地图还是用来计算位置的周围环境的地图?
思想实验时间!你被内在维度扭曲到一个陌生的地方。你做的第一件事是什么?恐慌?好吧,冷静下来,深呼吸。再来一杯。现在,你做的第二件事是什么?环顾四周,试着找到熟悉的东西。一把椅子在你的左边。植物在你的右边。你前面有一张咖啡桌。
接下来,曾经***恐惧“我到底在哪里?”慢慢地,你开始行动。等等,在这个维度中运动是如何工作的?向前迈一步。椅子和植物越来越小,桌子越来越大。现在,你可以确认你确实在前进。
观测是提高SLAM估计精度的关键。在下面的视频中,当机器人从一个标记移动到另一个标记时,它构建了一个更好的环境地图。
回到另一个维度,你走得越多,你的方向就越明确。在所有方向上的步进确认了这个维度中的运动与你的家维度相似。当你向右走的时候,植物就显得更大了。在这个新世界里,你可以看到一些你认为是地标的东西,这些东西能让你更加自信地漫步。
这实质上是一个猛击的过程。
流程的输入
为了进行这些估计,这些算法使用了一些数据,这些数据可以分为内部数据和外部数据。对于你的跨维度运输的例子(承认,你有一个有趣的旅行),内部测量是步骤和方向的大小。
外部测量是以图像的形式进行的。对于眼睛和大脑来说,识别植物、椅子和桌子等地标是一项简单的任务。已知最强大的处理器——人脑——能够拍摄这些图像,不仅能识别物体,还能估计到物体的距离。
不幸的是(或者幸运的是,取决于你对天网的恐惧),机器人没有人脑作为处理器。机器依靠硅芯片和人类编写的代码作为大脑。
其他机械部件进行外部测量。外围设备,如陀螺仪或其他惯性测量单元(IMU)是有帮助的。自动驾驶汽车等机器人也使用车轮位置的里程表作为内部测量。

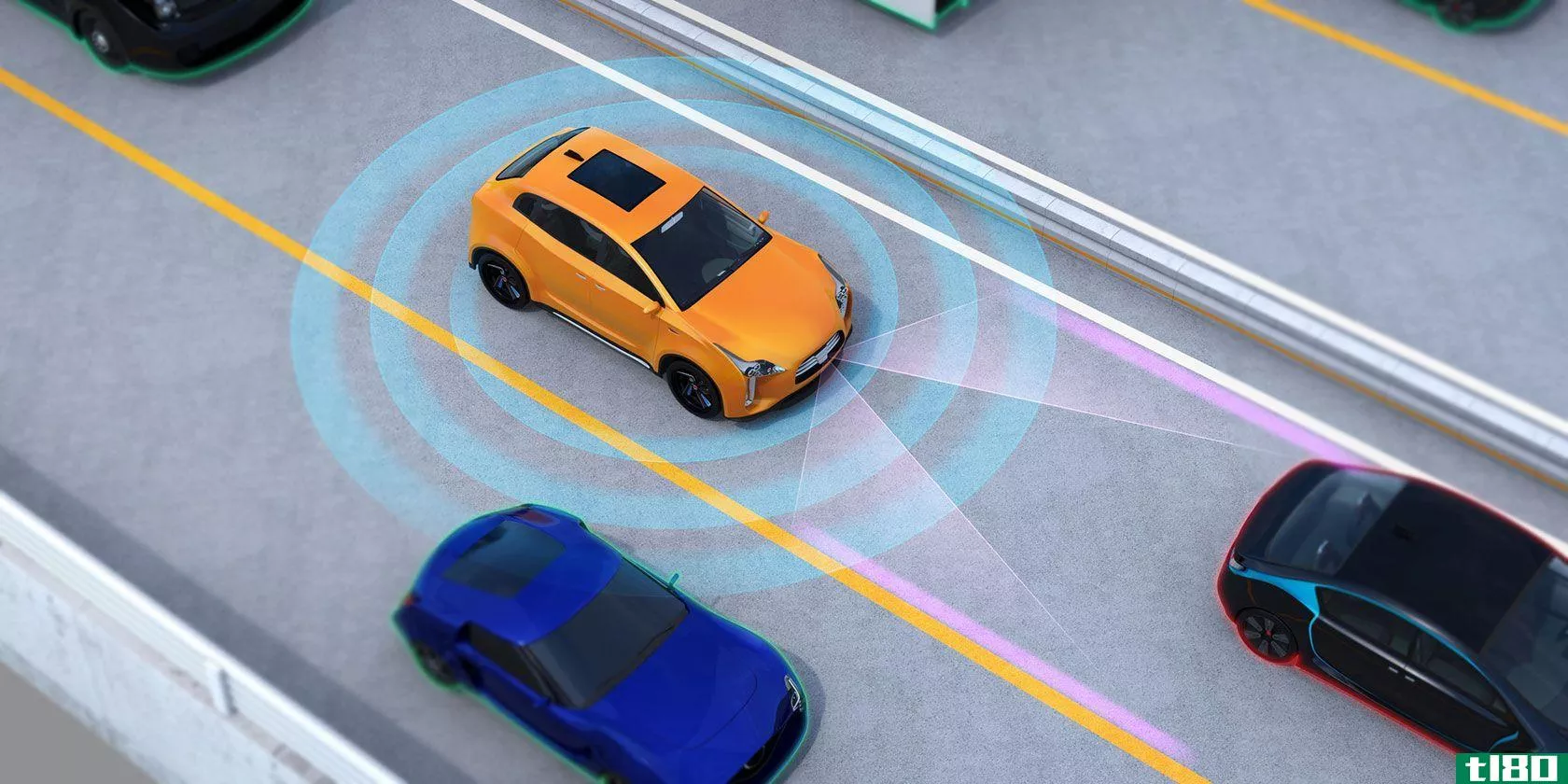
在外部,自动驾驶汽车和其他机器人使用激光雷达。类似于雷达使用无线电波的方式,激光雷达测量反射光脉冲来识别距离。使用的光通常是紫外线或近红外,类似于红外深度传感器。
激光雷达每秒发出数以万计的脉冲,以创建一个非常高清晰度的三维点云地图。所以,是的,下次特斯拉在自动驾驶仪上转来转去的时候,它会用激光向你射击。很多次。
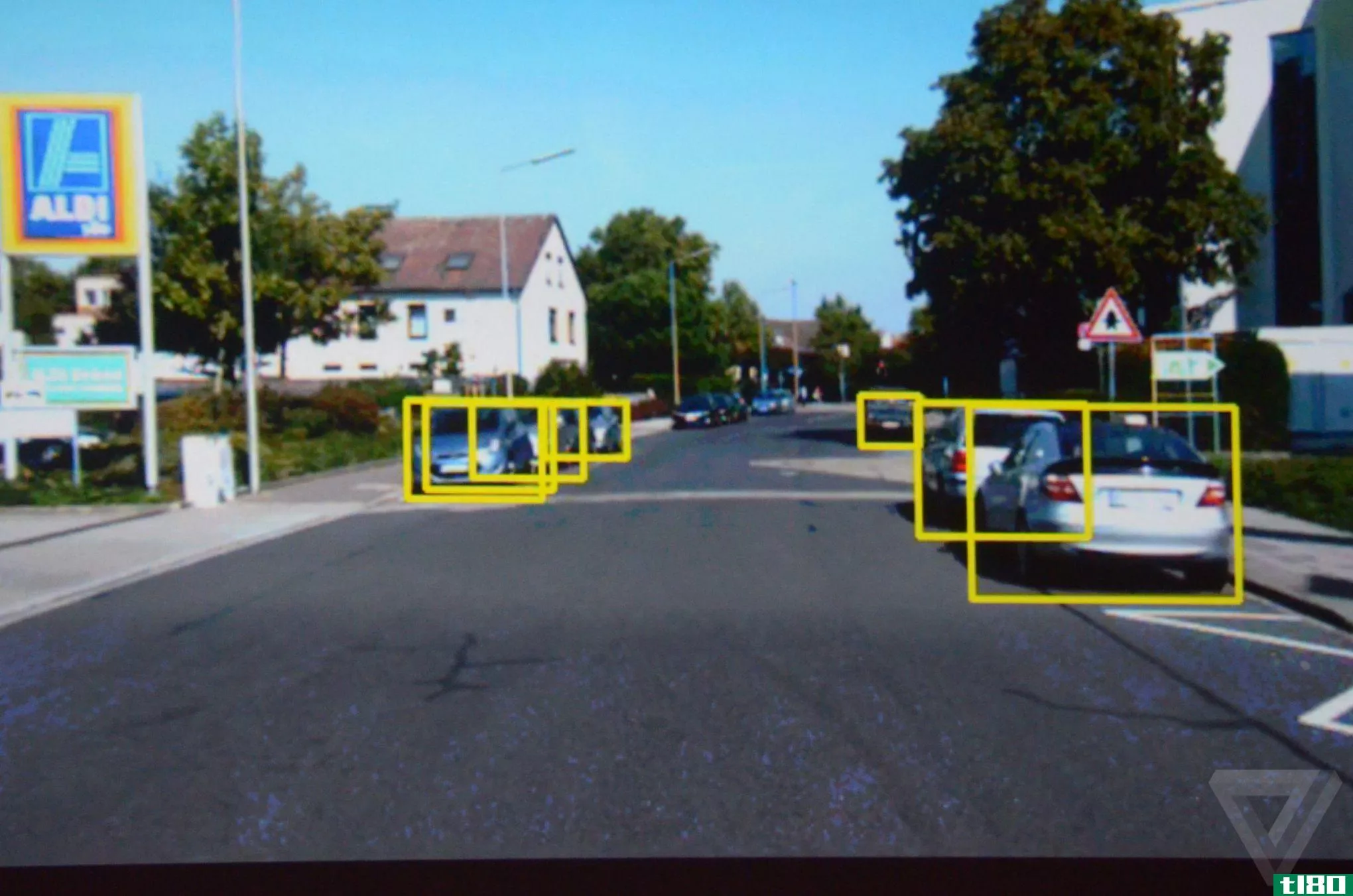
此外,SLAM算法使用静态图像和计算机视觉技术作为外部测量。这是一个单一的相机,但可以更准确地与立体声对。
黑匣子里面
内部测量将更新估计位置,可用于更新外部地图。外部测量将更新估计的地图,该地图可用于更新位置。你可以把它看作是一个推理问题,其思想是找到最优解。
一种常见的方法是通过概率。技术,如粒子滤波近似位置和映射使用贝叶斯统计推断。
粒子过滤器使用一组按高斯分布分布的粒子。每个粒子“预测”机器人的当前位置。每个粒子都有一个概率。所有粒子以相同的概率开始。
当进行相互确认的测量时(比如向前一步=表格变大),那么在它们的位置上“正确”的粒子被递增地给予更好的概率。远离的粒子被赋予较低的概率。
机器人能识别的地标越多越好。地标为算法提供反馈,并允许更精确的计算。
使用slam算法的当前应用程序
让我们把它分解,一个又一个很酷的技术。
水下机器人
无人潜艇可以使用SLAM技术自主操作。内部IMU提供三个方向的加速度和运动数据。此外,水下机器人使用面向底部的声纳进行深度估计。侧扫声纳可以产生几百米范围内的海底图像。
混合现实可穿戴设备
微软和Magic Leap已经生产出了可穿戴眼镜,引入了混合现实应用程序。估计位置和创建地图对这些可穿戴设备至关重要。这些设备使用地图将虚拟对象放置在真实对象之上,并使它们相互作用。
由于这些可穿戴设备体积小,它们不能使用大型外围设备,如激光雷达或声纳。取而代之的是,更小的红外深度传感器和朝外摄像头被用来绘制环境地图。
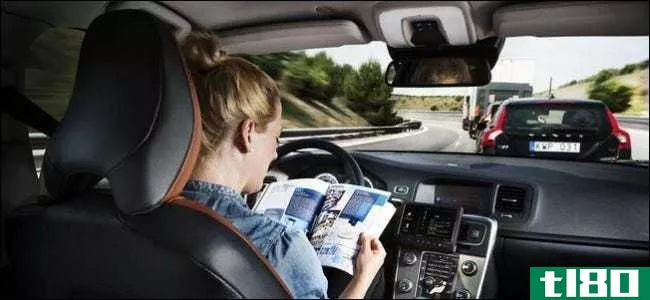
自动驾驶汽车
与可穿戴设备相比,自动驾驶汽车有一点优势。有了更大的物理尺寸,汽车可以容纳更大的电脑,并有更多的外围设备进行内部和外部测量。在很多方面,自动驾驶汽车代表了技术的未来,无论是在软件还是硬件方面。
slam技术正在进步
随着SLAM技术被用在许多不同的方面,它的完善只是一个时间问题。一旦每天都能看到自动驾驶汽车(和其他车辆),你就会知道同步定位和地图已经为每个人准备好了。
自动驾驶技术日新月异。想知道更多吗?看看MakeUseOf关于自动驾驶汽车工作原理的详细介绍。你可能还对黑客如何瞄准联网汽车感兴趣。
图片来源:chesky\ w/照片
- 发表于 2021-03-21 23:54
- 阅读 ( 350 )
- 分类:IT
你可能感兴趣的文章

7种可怕的场景自驾车成为可能
...考虑一下,一旦车辆的更多方面被软件控制,黑客会做些什么。 ...

你的第一辆自动驾驶汽车可能由微软提供动力
... 虽然微软还没有公开表示为什么他们突然对自动化汽车感兴趣,但这可能仅仅是因为希望世界在未来依赖微软Azure。 ...

什么是激光雷达?它是如何工作的?
... 什么是激光雷达(lidar)? ...
如何用automatic pro和stringify监控孩子的驾驶
...使你不在车里,它也能让你追踪你的车在哪里以及它在干什么。把它**你孩子的车里,你就能得到驾驶报告,显示他们去了哪里,以及他们的整体驾驶情况。然而,你可能并不关心他们去哪里,而是关心他们是如何到达那里的。...
什么是自动驾驶汽车,什么时候我的车道上会有一辆?
...传感器(雷达、距离计算激光等)来预测其他驾驶员在做什么,并做出相应的反应。 在当时两家公司进行的所有测试中(仅谷歌旗下23辆雷克萨斯SUV车队就驾驶了120万英里),无人驾驶汽车已经证明自己不仅在驾驶方面和人们...

不,谷歌和优步不会为自动驾驶汽车开战
...前,谷歌似乎正在削弱其试图与之合作的无线运营商。为什么它会抛出数十亿美元的出价,从它正试图合作的公司下面窃取频谱呢? 第二年早些时候,我们得到了答案:谷歌有一个政策议程。它没有赢得任何频谱...

苹果汽车会不会自动驾驶?
...的明显分歧说明了一个困扰汽车业多年的公关问题。”“自动驾驶”不是一个原子,是或否的功能;这是一个笼统的短语,指的是一整套能力。其中一些是在今天的道路上,并已多年,其他仍然只是一个阴影或两个科幻小说。正...

你希望你的孩子永远不用开车吗?
...的裂痕,需要很长时间才能解决。 从根本上说,你为什么希望你的孩子对他或她生活的世界了解得更少?这就像在争论,因为我们有计算器能够解代数方程,所以没有理由理解代数。我们的道路是我们生活的一个基本组成部...

谷歌与优步之争与自动驾驶出租车之争
...然拥有优势,优步也认识到了这一点,这或许可以解释为什么该公司如此积极地追求谷歌的工程师和高管。高清地图是成功的自动驾驶汽车项目的关键;Uber正在组建地图部门,与自动驾驶部门并行,前者由谷歌前员工组成,后...
英伟达在2016年消费电子展上宣布推出自动驾驶汽车“超级计算机”
...我们仍在直播Nvidia的活动,我们希望黄仁勋花时间解释为什么PX2在感知(显然是自动驾驶汽车的核心问题)方面比其他任何东西都要好。他喜欢费力地解释一切:他的主旨是带领我们了解人工智能发展的历史和英伟达在其中的作...
0 篇文章





